
自主作业技术研究及系统研发

农机装备是发展现代农业的重要物质基础。推进农机装备发展是提高农业劳动生产率、土地产出率、资源利用率的客观要求,是支撑农业机械化发展、农业发展方式转变、农业质量效益和国际竞争力提升的现实需要。
目前,我国已经成为世界最大的农机装备生产和使用大国,但90%以上的国产农机装备为中低端产品,高端农机装备仍需大量进口。《中国制造2025》明确了农机装备发展的方向和重点任务,指出“提高农机装备信息收集、智能决策和精准作业能力,推进形成面向农业生产的信息化整体解决方案”。
精准农业的核心思想就是要在准确的时间、准确的地方,用准确的方式、准确的数量实施播种、施肥、施药、收获等农田作业,实现“高产、高效、高质、高级和低害”的目标。农机自主作业控制技术是实现这一目标的核心技术,依据检测到的作物信息、工况信息和作业质量信息自主调控作业执行装置,以最小的资源投入获得最大的农业产出。变量作业是自主作业的重要内容,系统适用于播种、插秧、施肥、施药等农业机械。它与农机自动导航系统相配合,可实现变量作业控制,提高田间作业质量和效率,满足精准农业对农机信息化、智能化的需求。
农机自主作业技术是中国科学院沈阳自动化研究所在“十二五”期间确立的一个新的重点发展方向,旨在利用工业测控领域的技术积累开拓农机装备自主作业技术研究新方向。在多项863计划项目、重点研发计划项目的支持下,面向我国农机信息化、智能化的迫切需求,针对精准农业应用中需要解决的质量参数检测、精准控制等农业机械自主作业挑战性问题,在农业机械变量作业控制技术、智能收获技术等方面开展了深入研究,提出了一套系统的分布式农机自主作业控制解决方案,取得了具有国际先进水平的技术成果。
智能收获技术研究与系统研发
在理论方法研究与关键技术攻关方面,中国科学院沈阳自动化研究所重点开展了籽粒破碎率检测、夹带损失检测、高效低损作业控制等农机自主作业瓶颈技术研究。针对粮箱内玉米籽粒流量大、流速快、清洁度低、封闭无光等环境层面的检测难题,自主研发了一种同步带式玉米籽粒破碎率在线采样装置,所研发的装置从粮箱内抽取部分样品,抽取的籽粒经过平铺和单层化后,进入图像采集区。进入图像采集区的玉米籽粒由于经过了减速、平铺和单层化的过程,携带较少灰尘且与传送带基本保持相对静止状态,图像采集区域清洁,这为采集到清晰的玉米籽粒图像提供了条件。
为了解决由于不同品种的玉米籽粒形态存在很大差异,即使是同一品种的同一果穗的不同部位玉米籽粒在大小、形态方面也存在很大差异,给籽粒破碎率在线检测带来的类别层面难题,中国科学院沈阳自动化研究所提出了一种传统图像特征识别方法与深度学习相结合的完整玉米籽粒提取方法。该方法首先采用传统的特征识别方法对采集图像中的每个玉米籽粒进行标记,然后采用深度学习的方法对每个籽粒进行完整性判别。
为了解决车体振动给夹带损失检测带来的环境层面难题,中国科学院沈阳自动化研究所自主研发了一种基于压电效应的差分冲击式夹带损失率检测传感器,该传感器将不同物体,如玉米籽粒、杂质、碎秸秆、玉米果芯对冲击板的冲击转化为电信号,差分结构可有效抑制车体振动对检测结果的干扰。为了解决由于揉碎的果芯在重量和体积上与籽粒较为接近给夹带损失率检测带来的类别层面难题,提出了一种基于支持向量机分类的玉米籽粒冲击信号的识别算法。在不同的冲击角度与高度实验条件下,对成熟度不同的玉米籽粒和大小不同的杂余进行冲击试验,提取冲击波形的主要特征,作为数据集。对于得到的数据集,采用支持向量机的多分类方法,对模型进行训练,得到分类模型。在不同的风机转速和筛子开度实验条件下,根据传感器的安装位置所检测到的籽粒个数占整个排出口的比例,计算得到测试时间内所有的籽粒损失个数。实验结果表明,类别分辨准确率在91%左右。为了解决多变量、强耦合、非线性的作业系统控制难题,设计了一种采用包含智能设定层和基础回路层的两层控制结构的作业系统控制方案。智能设定层以数据为驱动,以人工智能混合建模理论为基础,解决多回路的强耦合难题,实现回路解耦。基础回路层以非线性控制理论为基础,设计渐进稳定的指数趋近律,实现单回路的无超调控制。
在核心装置开发与系统集成方面,提出了一套系统的分布式农机自主收获作业智能控制解决方案。研究开发出割台仿形装置、籽粒破碎率在线检测装置、夹带损失率检测装置、筛子开度调节装置、凹版间隙调节装置等一批具有自主知识产权的农机智能收获控制系统核心装置,如图1所示。
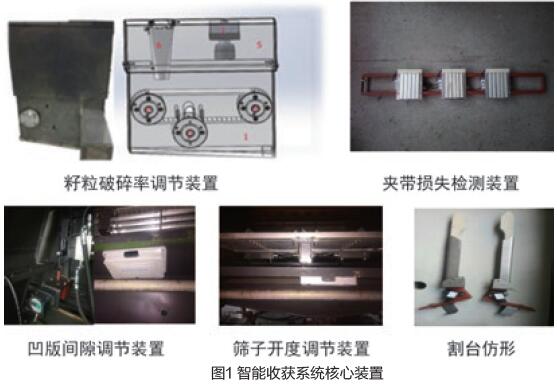
以CAN总线为通信媒介,将以上核心装置布设在联合收割机上,构建了联合收割机自主作业系统。系统可依据籽粒破碎率、夹带损失率、清选损失率等质量指标参数和负荷等工况参数,自动调整收获机工作部件,实现自主高效高质收获作业。
变量施药技术研究与系统研发
在理论研究方面,主要针对变量作业控制中的建模和精准施药控制方法研究,总结农田作业机械的共同特点,首先建立了机具作业通用模型,然后依据不同机械的特点,建立了播种、施肥、喷药等作业子模型;提出了基于知识库和模糊推理的变量作业模糊控制方法。
在核心装置开发与系统集成方面,设计开发了变量喷药作业控制器,如图3所示。变量喷药作业控制器设计的主要目标是实现田间变量喷药作业控制,并与GPS导航系统相结合,实现精准作业。其主要功能包括以下三个方面:1)作业处方图的下载和解析;2)变量喷药作业的自动控制;3)车辆行驶速度的控制。变量作业控制器与导航控制器相配合,根据处方图来控制喷药机喷头的开闭时间和程度,完成喷药的变量控制;并根据处方图的要求,以地速传感器作为反馈,通过调节油门实现农机行驶速度的控制。

设计研发了喷杆式变量施药装置,如图4所示。出于环保和控制成本考虑,变量喷药作业中对喷药量的精度要求较高。在实际控制中,通常采用流量计作为喷药量的反馈传感器,但受喷药管路中的压力不均衡、电磁阀启停动作等的影响,各喷头的实际喷药量还需要进行精确测量,以修正控制方法、提高喷洒精度。所以设计制作了喷杆式变量喷药装置。以市售喷杆式喷药机为基础设计,为了方便进行实验,采用汽油机作为喷药压力的动力源。各喷头皆加装了电磁阀,以分别进行喷洒控制;药液管路中加装了压力传感器、流量传感器,作为变量喷药控制的反馈传感器。在进行变量喷药实验时,每个喷头下放置一个容器用于收集药液,最后将药液分别称重,即可得出每个喷头精确的喷药量。
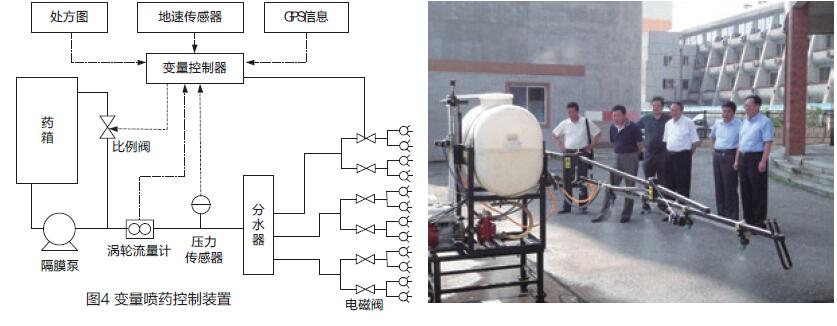
以雷沃TA800拖拉机为载体,集成了完整的自动导航控制和变量喷药控制系统,并与2013年9月在建三江农场成功地进行了田间试验,如图5所示。

作者单位:中国科学院沈阳自动化研究所


版权:《高科技与产业化》编辑部版权所有 京ICP备12041800号 地址:北京市海淀区中关村北四环西路33号 邮编:100080 联系电话:(010)82626611-6618 传真:(010)82627674 联系邮箱:hitech@mail.las.ac.cn |